为多角度展现学院优秀学位论文风采,树立优秀学位论文标杆,加强学位论文写作经验交流,学院将陆续分享我院2024年各类获奖优秀学位论文,希望为研究生的科研及论文写作提供一些经验和参考。
本期推出的是2024年中国宇航学会高水平博士学位论文——航天器姿态自适应渐近跟踪控制研究,获奖者夏冬冬。
中国宇航学会于2024年5月开展了第二届“中国宇航学会高水平博士、硕士学位论文激励计划”。经形式审查,双盲评审,终评评议,航天学院博士毕业生夏冬冬(导师:岳晓奎教授)最终入选"中国宇航学会高水平博士学位论文激励计划"。

博士论文 中文题目 | 航天器姿态自适应渐近跟踪控制研究 |
博士论文 英文题目 | Research on Adaptive Asymptotic Tracking Control for Spacecraft Attitude |
作 者 | 夏冬冬 |
指导教师 | 岳晓奎 |
学科专业 | 飞行器设计 |
读博感言 | 行胜于言 |
博士阶段 所获奖励 | 2024,CSA宇航学会高水平博士学位论文激励计划,中国宇航学会; 2022,西北工业大学博士论文创新基金(重点)项目,西北工业大学; 2022,陕西省第十七届运动会羽毛球大学生甲组男子团体赛亚军,陕西省人民政府 2021,博士研究生国家奖学金,教育部; 2020、2021,优秀研究生,西北工业大学; 2020,中航工业专项奖学金,中国航空工业集团; |
论文研究背景及意义
随着人类空间技术研究和开发应用能力的不断发展,世界各航天强国都陆续加大了对空间探索的投入,并频繁开展各项空间任务活动,以期占领空间应用技术领域的制高点。然而,目前的空间任务都需要航天器携带全部的软硬件资源入轨,无论是由于燃料耗尽还是某些仪器设备发生故障或意外情况,都会使得这些航天器在有限且宝贵的轨道资源上寿终或失效。如果想要恢复或升级相应功能,则需要派遣航天员进行在轨维修或者发射相应的替代卫星,这种风险巨大且代价高昂的方式使得在轨服务(on-orbit service) 技术有着广阔的市场需求(图1)。
然而,作为服务对象的目标航天器通常是一些失效或非合作的卫星,这对服务航天器的空间操作和控制能力提出了极大的挑战。姿态控制系统作为航天器重要的分系统之一,其控制能力是否满足要求对在轨服务任务的成败有着举足轻重的影响。面对未来复杂的在轨服务任务,姿态控制系统极有可能存在着模型参数不确定、复杂未知干扰、角速度状态不可测、执行机构故障和复杂约束条件等典型特征,这对相应的姿态控制方案提出了更多的需求和更高的要求。因此,在综合考虑实际工程中存在的多种不确定性和工程约束的情况下,开展具有低复杂度和高性能特点的姿态控制方案对未来智能自主在轨服务具有重大的理论研究意义和工程应用价值。
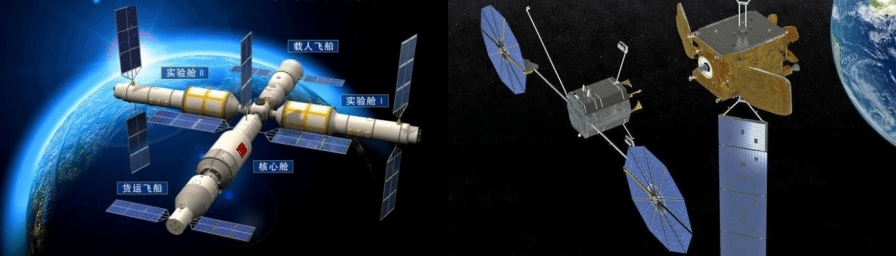
图1 在轨服务任务
论文主要研究内容与创新点
本论文依托航天学院空间操作技术研究所航天飞行动力学技术国家级重点实验室,面向国家航天领域重大需求开展研究,主要针对在轨服务任务中普遍存在的惯性参数不确定、未知动态干扰、执行机构故障、部分状态不可测和全状态运动约束等问题,考虑实际工程中航天器有限的燃料能源和计算资源等条件限制下,基于自适应控制方法,开展具有渐近收敛特性的航天器姿态跟踪自适应理论、方法研究(图2)。主要的研究内容和成果可以概括为以下几个方面:
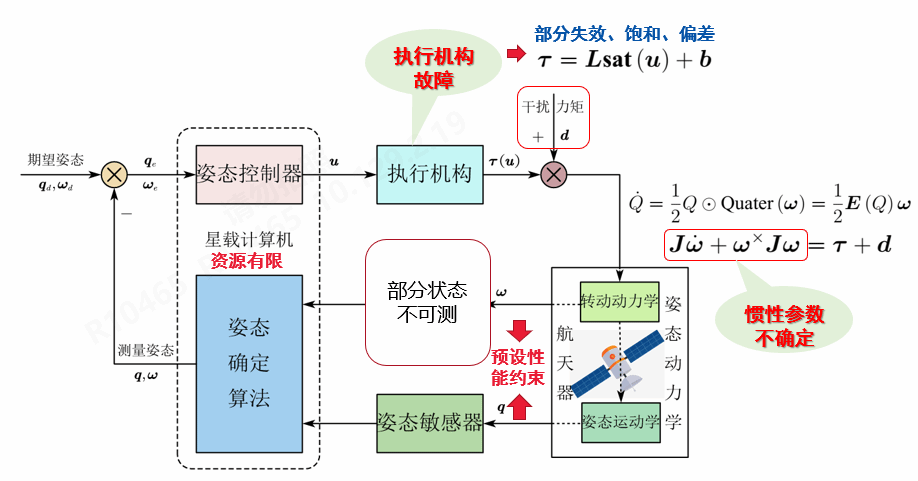
图2 主要研究内容
(1)针对航天器姿态控制系统中存在惯性参数不确定的问题,基于浸入与不变理论设计了一套更加简洁高效的航天器姿态自适应渐近跟踪控制方案。基于饱和函数提出了一种新颖的缩放因子设计方法,使得所提出的控制算法中不需要任何模型信息,采用常数反馈增益即可保证闭环系统的渐近稳定性,从而解决了传统纯积分形式可能存在的“高增益”控制问题(图3)。
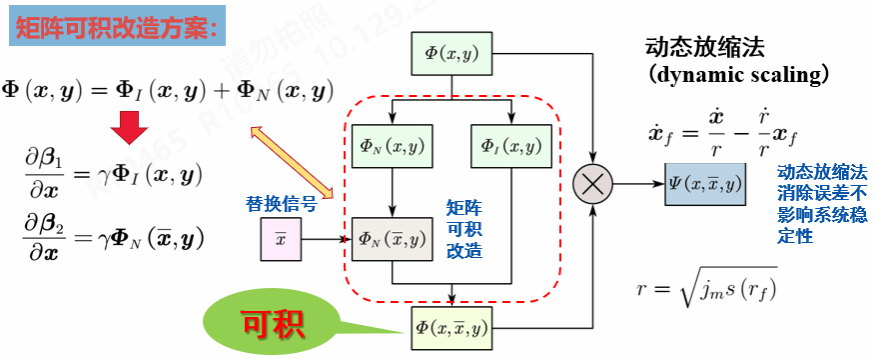
图3 浸入与不变自适应控制方案
(2)针对航天器姿态控制系统中存在惯性参数不确定、有界未知干扰和执行机构故障等问题,设计了一套容错自适应渐近跟踪控制方案。所提出的控制算法不需要任何模型信息,只包含两个自适应参数的负反馈形式就可保证闭环系统的渐近稳定,可以视为一种低复杂度的容错自适应渐近跟踪控制器设计方案(图4)。
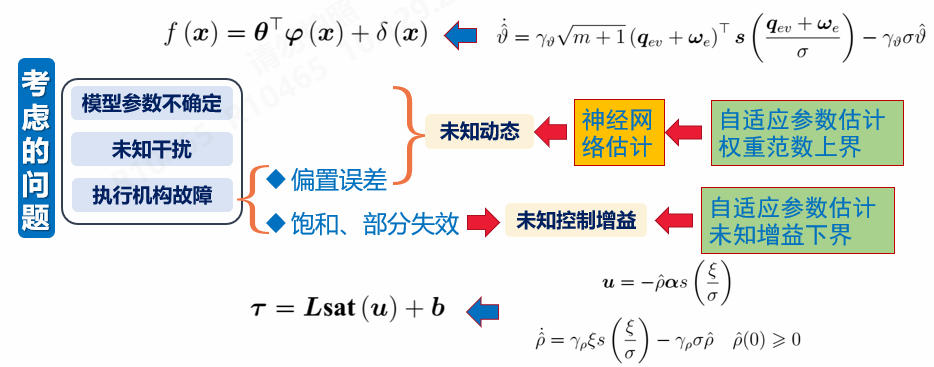
图4 容错自适应控制方案
(3)针对航天器姿态控制系统中存在惯性参数不确定、有界未知干扰和执行机构故障等多源不确定性的条件下,通过构造一个増广滤波系统,设计了一套无需角速度信息的输出反馈自适应渐近跟踪控制方案。所提出的控制算法不需要任何模型信息,只需含有两个自适应参数的负反馈即可处理多源不确定性带来的未知动态和控制增益不确定性,并能保证跟踪误差的渐近收敛(图5)。
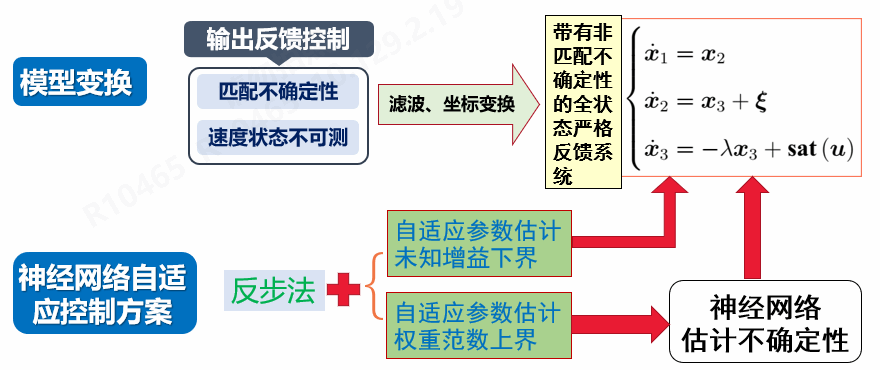
图5 输出反馈自适应控制方案
(4)针对航天器姿态控制系统中存在惯性参数不确定、有界未知干扰和执行机构故障等问题,设计一套全状态预设性能自适应渐近控制方案。所提出的控制算法不需要任何模型信息,只需两个自适应参数的负反馈就可保证坐标变换后的误差渐近收敛,在保证了原始姿态和角速度跟踪误差渐近收敛的同时还能满足预设性能约束(图6)。
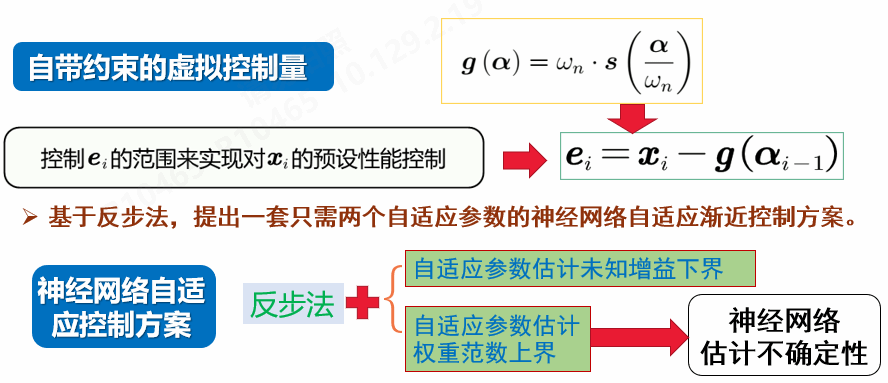
图6 全状态预设性能自适应控制方案
代表性创新成果
[1] Xia D, Yue X, Yin Y. Output-feedback asymptotic tracking control for rigid-body attitude via adaptive neural backstepping[J]. ISA transactions, 2022.(SCI一区top)
[2] Xia D, Yue X. Anti-unwinding immersion and invariance adaptive attitude control of rigid spacecraft with inertia uncertainties[J]. Journal of Aerospace Engineering, 2022, 35(2): 04021137.(SCI三区)
[3] Xia D, Yue X. Dynamic scaling‐based adaptive control without scaling factor: With application to Euler–Lagrange systems[J]. International Journal of Robust and Nonlinear Control, 2021, 31(10): 4531-4552. (SCI一区)
[4] Xia D, Yue X, Wen H. Output feedback tracking control for rigid body attitude via immersion and invariance angular velocity observers[J]. International Journal of Adaptive Control and Signal Processing, 2020, 34(12): 1812-1830. (SCI三区)
[5] Xia D, Yue X, Wen H, et al. Immersion and invariance adaptive tracking control for robot manipulators with a novel modified scaling factor design[J]. International Journal of Adaptive Control and Signal Processing, 2020, 34(1): 110-125. (SCI三区)
[6] 夏冬冬, 岳晓奎. 基于浸入与不变理论的航天器姿态跟踪自适应控制[J]. 航空学报, 2020, 2. (EI)
论文研究历程
夏冬冬本科毕业于南京理工大学,毕业后作为推免研究生进入西北工业大学航天学院深造,通过硕博连读正式成为一名博士研究生,师从岳晓奎教授。
在选题之初,夏冬冬通过系统的文献综述,全面了解了航天器姿态控制领域的研究现状,阅读大量相关文献,分析和整理已有研究的理论基础、研究方法和主要成果,寻找潜在的研究不足,从而提炼相关研究内容。由于对学术研究的浓厚兴趣,夏冬冬在确定博士论文课题时,遇到了一些困难,但通过不断的探索和与导师岳晓奎教授的多次讨论,最终确定了航天器姿态控制这一研究方向,并成功获得博士论文创新基金重点项目的资助。在明确研究方向后,夏冬冬与导师共同制定了详细的研究计划,明确研究目标和具体研究问题,设计研究方法和技术路线,并定期与导师和实验室成员讨论研究进展,获取建议和反馈,调整研究方向或方法。
在研究过程中,夏冬冬通过辛勤的工作,取得了较为优秀的学术成果,以第一作者在ISA Transactions、International Journal of Robust and Nonlinear Control 等重要期刊发表高水平论文6篇。在导师的悉心指导下,夏冬冬根据研究成果,草拟论文大纲,明确各部分的结构和内容,反复修改论文和提升论文质量,将初稿提交导师审阅,获取详细反馈和修改建议。在导师和实验室成员的支持下,夏冬冬最终完成了高质量的博士论文。经过预答辩、外审和正式答辩,夏冬冬的博士学位论文得到了评审委员会和专家们的一致好评,被认为是一篇优秀的博士论文。并且,博士学位论文最终入选中国宇航学会高水平博士学位论文激励计划。这一过程不仅是他个人学术能力的体现,也离不开导师、实验室和学院的全力支持。
图文: 夏冬冬 邢妍
审核: 宁昕



 官方微信
官方微信