近日,西北工业大学航天学院罗建军教授团队博士生惠旭晟在液体环境非接触式操控技术研究方面取得了突破性进展。相关研究成果以“Noncontact Manipulator for Sedimented/Floating Objects via Laserinduced Thermocapillary Convection”等为题形成了系列论文,发表在机器人领域顶级期刊《IEEE Transactions on Robotics》 (T-RO)、机器人顶会《IEEE International Conference on Robotics and Automation》 (ICRA 2025接收),以及机电领域顶刊《IEEE/ASME Transactions on Mechatronics》 (TMECH)上,西北工业大学为上述系列论文的唯一作者单位,博士生惠旭晟为上述系列论文的第一作者,航天学院罗建军教授为论文的通讯作者。

液体环境和气液界面是微/纳米流体、生化分析、细胞工程、微制造、微组装和微机器人技术等领域常见的两种工作环境。由于这些细胞组织和技术元件具有微型化、易碎、无菌和无尘等特点,因此对操作技术的精确性、灵巧性和无损性提出了严格的要求。非接触式操作技术在应对上述挑战中具有显著的优势和深远的意义。传统光镊、声镊、介电泳、磁控等技术对于被控物的尺寸、透明、磁性等材料特性,以及液体介质和容器基底的特性都提出了不同限制。因此,同时面向泛化的沉积颗粒和漂浮物,以及面向单目标与多目标的通用化非接触操控方法和平台仍是一项巨大的挑战。在此基础上,对非特定漂浮物进行无模型和自适应的运动控制和操作更是困难重重。
针对上述问题,该系列论文提出了一种基于激光诱导热毛细对流的操控方法和硬件平台,能够实现对非特定沉积颗粒和漂浮物体精确、平滑、快速和自适应的运动控制和姿态控制。针对沉积颗粒,采用高速扫描激光诱导分布式热毛细对流场,实现了对单个颗粒的运动路径控制(图1)和多颗粒的集群运动控制和有序分布(图2)。

图 1 激光诱导热毛细对流驱动单个聚苯乙烯微球(0.1mm)写出Manipulate字样
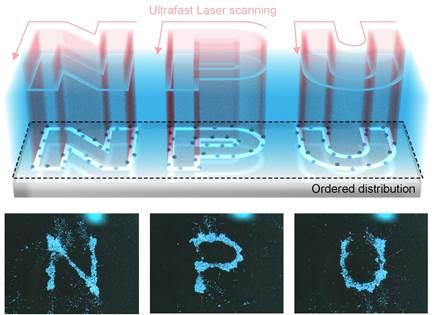
图 2 激光诱导热毛细对流驱动聚苯乙烯微球集群形成NPU字样
针对漂浮物的运动控制,提出了“Laser Propulsor (激光推进器)”操控策略和VALP (Vision-Based Adaptive Laser Propulsor) 操控技术,并研制了操控平台(图3),通过高度定向化的驱动,实现了对泛化漂浮物的运动控制。利用操控系统优异的响应速度,以激光多路复用的方式实现了对多个漂浮物的同步运动控制。针对漂浮物的姿态控制难题,提出了“Laser Gripper (激光夹钳)”操控策略和VALG (Vision-Based Adaptive Laser Gripper) 操控技术,通过基于视觉信息的轮廓化扫描激光,实现了对泛化漂浮物在目标特性未知条件下的无模型自适应位置姿态同步控制(图4)。这项工作的特色是提出的策略并不依赖于目标、溶剂和基质的具体特征,使其成为一个适用于泛化沉积物和漂浮物的多功能通用平台;提出的非接触式操纵策略和操控平台在微/纳米流体、生化分析、细胞工程、微制造、微组装和微机器人等领域具有广阔的应用前景。
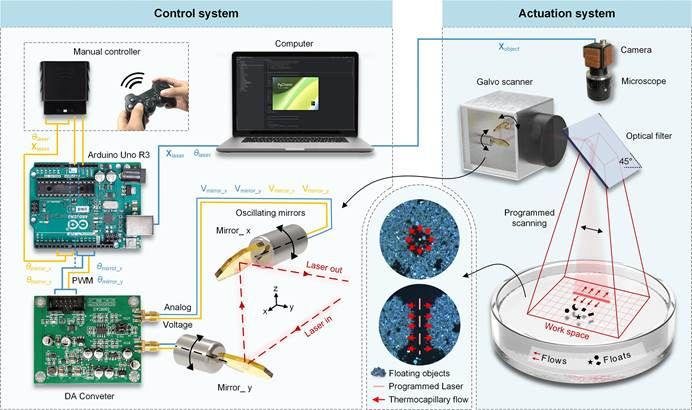
图 3 VALG (Vision-Based Adaptive Laser Gripper) 操控平台

图 4 非特定漂浮物(2mm)的位置和姿态同步控制
《IEEE Transactions on Robotics》是IEEE机器人与自动化学会的旗舰期刊,被公认为是国际机器人学领域的顶级期刊。该期刊致力于发表具有重要理论突破或创新性应用的高质量研究成果,是衡量全球各大高校机器人学术水平的重要标志。该期刊每年发文量约200篇,其中包含国内作者或单位的论文约有50篇,其发表的文章通常具有前瞻性,涵盖了机器人学的核心问题及其在各类复杂环境中的应用,推动了全球机器人技术的持续发展。
上述研究工作得到了国家自然科学基金项目、西北工业大学博士论文创新基金等项目的支持。
近年来,罗建军教授课题组围绕航天飞行动力学与自主GNC技术,空间飞行智能规划与博弈控制、在轨服务与机器人操控开展研究,承担国家自然科学基金重大项目/重点项目、国家863计划重点课题、XXX重点项目等各类项目二十余项,已在IEEE T-RO、IEEE/ASME TMECH、ACS Nano、AST、ICRA、航空学报、宇航学报等国际国内权威学术期刊和国际会议发表学术论文100余篇;获授权中国发明专利30项;出版研究生教材和学术专著6部。课题组致力于培养具有国际视野和创新能力的航天科技人才。通过学科融合与前沿交叉,不断探索航天飞行动力学与应用领域的前沿理论与创新方法,拓展在轨服务与操控技术的应用边界,提升研究生培养质量,助力实现航天强国的宏伟目标。
文章链接:https://doi.org/10.1109/TRO.2025.3532503;
https://doi.org/10.1109/TMECH.2025.3532943
文图:惠旭晟、申媛媛
审核:宁昕



 官方微信
官方微信